Inferring magnetic geometry without magnetic diagnostics
A deceptively simple but scientifically rigorous inverse problem — and a probe of how far machine learning can be pushed toward truly machine-agnostic plasma state estimation.
The diagnostics that built tokamak control are about to fail
Magnetic confinement fusion is transitioning from physics-exploration tokamaks to a new generation of reactor-class devices — SPARC, ARC, CFETR — designed to demonstrate net energy gain. These machines will deliver neutron fluxes more than an order of magnitude higher than any existing facility.
In that environment the very diagnostics that have underpinned tokamak control for half a century — Mirnov coils, pickup loops, Rogowski coils mounted near the vessel walls — face severe degradation. Radiation-induced EMF and conductivity produce drift voltages that exceed the signal of interest in long pulses, and structural transmutation slashes sensor lifetime to a fraction of a commercial plant’s operating hours.
The equilibrium-reconstruction problem doesn’t disappear — it becomes more important. Strip the magnetic signals from the classic EFIT code and it loses essentially all of its constraints: the capability we will most demand of next-generation devices is the one our existing toolkit cannot deliver.
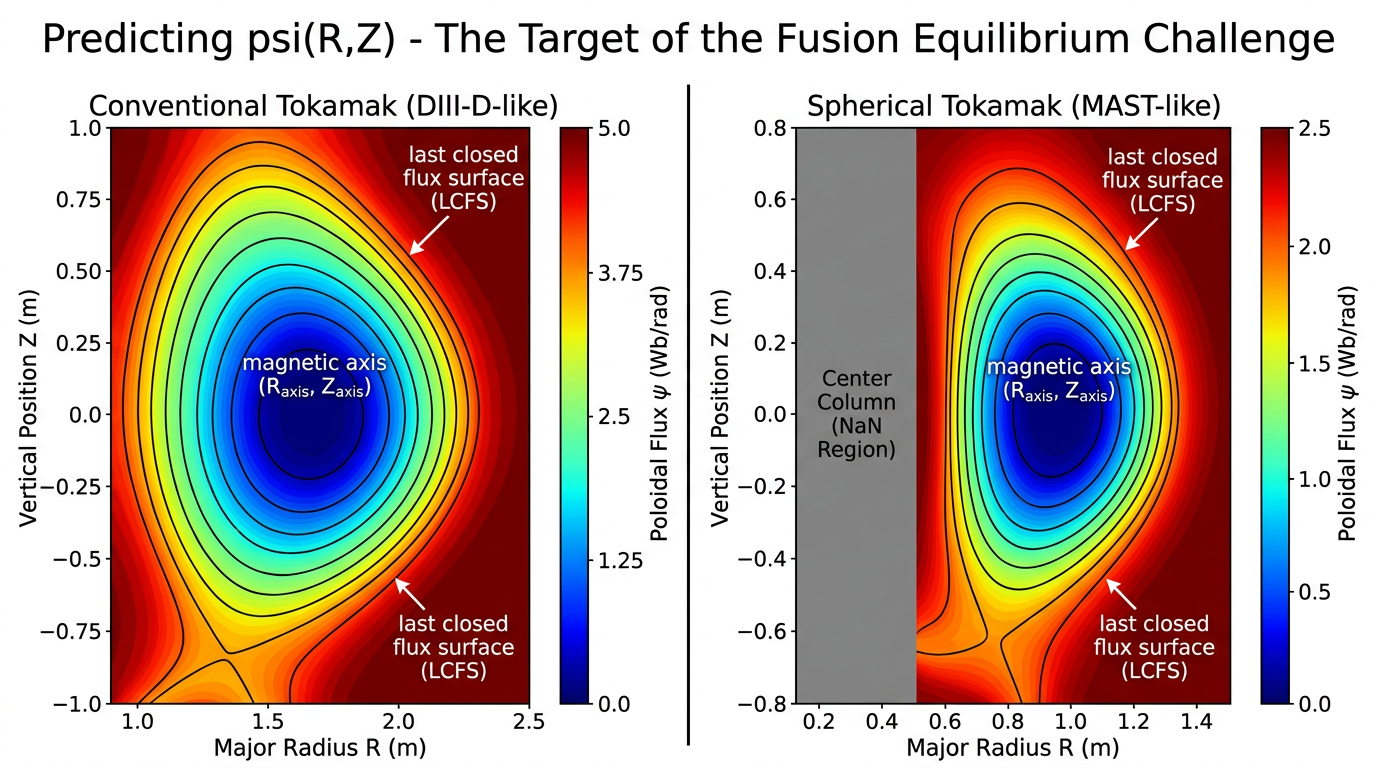
ψ(R,Z): nested contours are magnetic flux surfaces; the outermost closed surface is the plasma boundary.“Can machine learning, trained on present-day machines, learn an equilibrium representation that survives the loss of magnetic diagnostics?”
What you are given, and what you predict
For a held-out shot, you receive non-magnetic diagnostic inputs at every EFIT timestamp and predict the equilibrium.
Inputs (non-magnetic)
- Coil currents — 18 F-coils, ohmic solenoid (ECOILA) and toroidal-field coil (bcoil) on DIII-D; 10 P-coils, solenoid, toroidal-field (TF) and error-field (EFPS) coils on MAST. 21 signals on DIII-D, 14 on MAST.
- Thomson scattering — electron temperature
Teand densityneprofiles (core & edge views). - Plasma current
Ip. - X-point gap
dsep— diverted vs. limited indicator.
Outputs (the equilibrium)
- Full flux map
ψ̂(R,Z)on a 65×65 grid. - Last closed flux surface (LCFS) contour — the plasma boundary.
- Five scalars — normalized beta βN, internal inductance li, edge safety factor q95, and the magnetic-axis coordinates (Raxis, Zaxis).
Cross-machine generalization, not just a train/test split
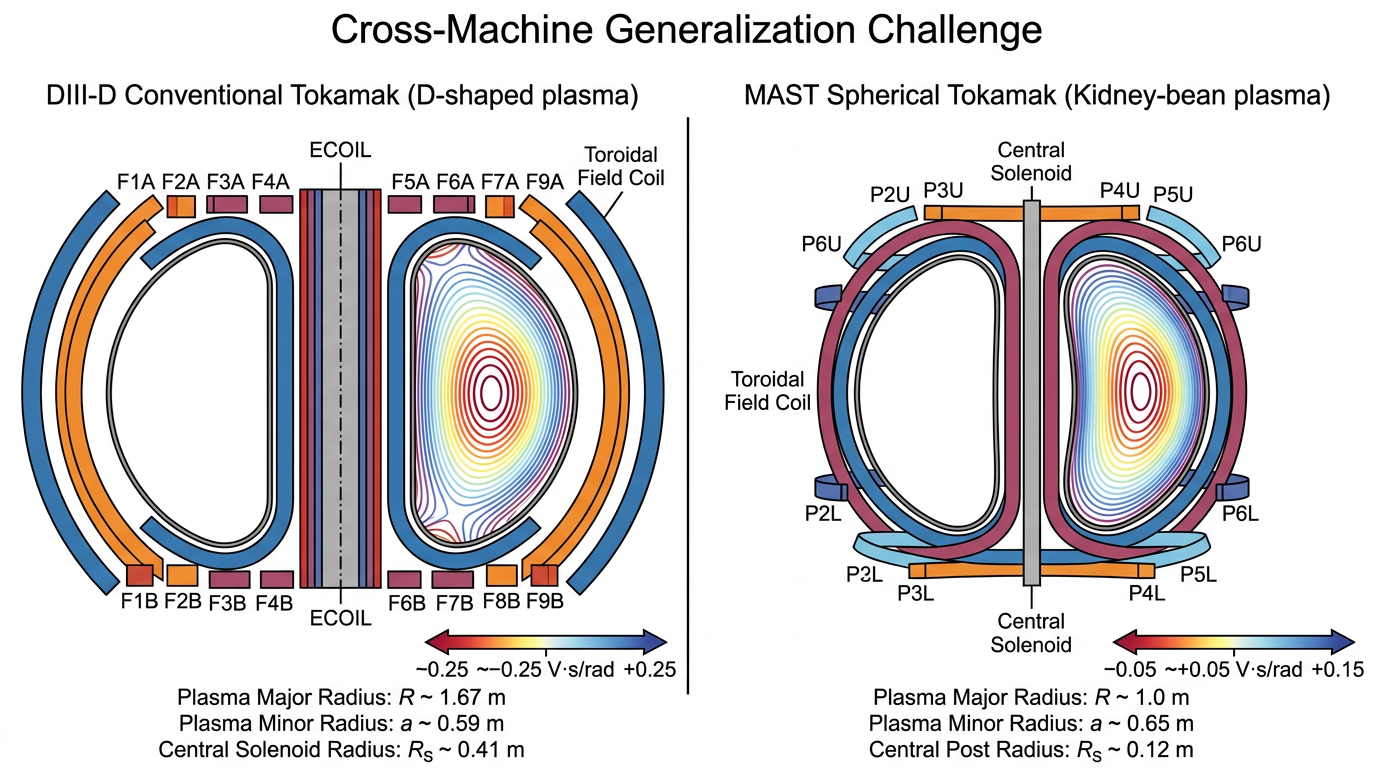
A second award targets the harder question: train on DIII-D and transfer zero-shot to the topologically distinct MAST. The two machines differ in coil layout, flux geometry, and diagnostics.
Our pilot baseline makes the difficulty explicit: a naïve coil-mapping transfer scores SSIM 0.83 on DIII-D but only 0.10 on MAST. We frame that collapse as a failure on purpose — it is a far more honest measure of generalization than a within-machine split, and a direct test of whether a model captures the universal physics of the Grad–Shafranov equation or merely one device’s engineering minutiae.